In this post I have explained a simple water level controller circuit applicable for automatic toggling of two submersible water pumps alternately in response to a predetermined water level switching. The entire circuit is built using just a single IC and a few other passive parts. The idea was requested by one of the interested members of this blog.

Technical Specifications
Can you help me with this problem: In a basement sump, there are two submersible pumps with float switches (P1 and P2) installed to achieve some level of redundancy.
In order to use both pumps equally, we want to alternate between P1 and P2 whenever a preset water level is reached. That is, the first time the preset level is reached P1 should start and pump the water out. Next time when the preset level is reached P2 should start and pump the water out.
On next occasion it will be P1's turn and so forth. What we need is an "alternating" relay control running P1 and P2 turn by turn.
The Design
The shown circuit of an automatic submersible pump controller can be understood as given under:
As can be seen the entire circuit is built around four NAND gates from a single IC 4093.
The gates N1--N3 form a standard flip flop circuit wherein the output of N2 toggles from high to low and vice versa in response to every positive trigger at the junction of C5/R6.
N4 is positioned as a buffer whose input is terminated as the sensing input for detecting the presence of water over a predetermined fixed level inside the tank.
The link from the ground or the negative of the circuit is also stationed into the tank water close and parallel to the above sensing input of N4.
Initially assuming no water in the tank keeps the input of N4 at high via R8, resulting in a low output at the junction of C5/R6.
This renders N1, N2, N3 and the entire configuration in a unresponsive standby position, resulting in T1, T2 being in a switched OFF position.
This holds the respective relays REL1/2 in an deactivated position with their contacts at N/C levels.
Here REL2 contacts make sure that the supply voltage stays cut off during the absence of water in the tank.
Now suppose water in the tank starts rising and bridges the ground with N4 input rendering it low, this prompts a high signal at the output of N4.
This high at the output of N4 activates T2, REL2 and also flips the output of N2 such that REL1 also gets activated. Now REL2 allows the mains voltage to reach the motors.
And with REL1 also activated actuates the pump P2 via its N/O contacts.
As soon as the water level sinks below the preset point reverts the situation at the input of N4, creating a low a its output.
However this low signal from N4 produces no effect on REL1 as N1, N2, N3 hold REL1 in the activated position.
REL2 being directly dependent on N4 output switches OFF cutting off mains supply to the motors and switching P2 OFF.
During the next cycle when water level reaches the sensing points, N4 output toggles REL2 as usual allowing mains supply to reach the motors, and also switches REL1 but this time toward is N/C contact.
This instantly flips P1 into operation because P1 is configured with the N/C of REL1 thus resting P2 and actuating P1 on this occasion.
The above alternate flipping of P1/P2 keeps repeating with the ongoing cycles as per the above operations.
Circuit Diagram
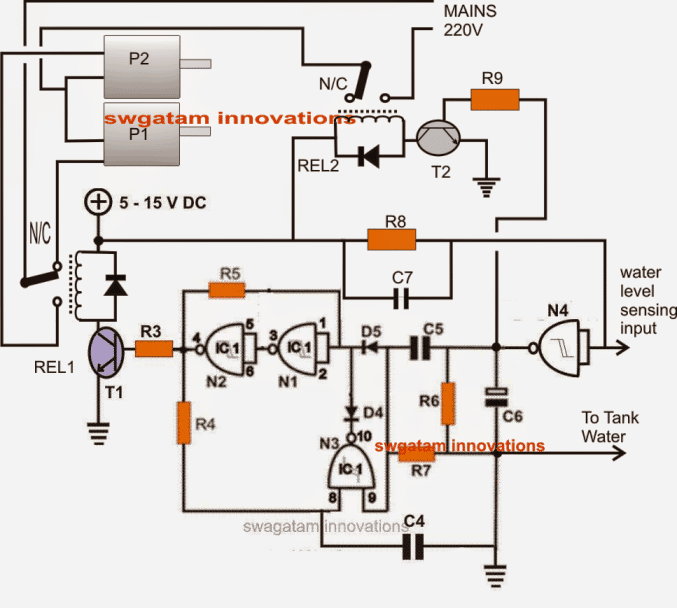
Parts list for the above automatic submersible pump controller circuit:
- R3, R9 = 10K,
- R4, R5, R8 = 2M2,
- R6, R7 = 39K,
- R4, R5 = 0.22, DISC,
- C6 = 100µF/25V,
- D4, D5 = 1N4148,
- C4, C5, C7 = 0.22uF
- T1, T2 = BC 547,
- N1---N4 = IC4093,
- Relays = 12V, SPDT, 20 amp contactsrelay dides = 1N4007
Have Questions? Please Comment below to Solve your Queries! Comments must be Related to the above Topic!!